|
Home License Download Tutorial Reference Projects Feedback History |
Run jsdb.exe debug.js myprogram.js
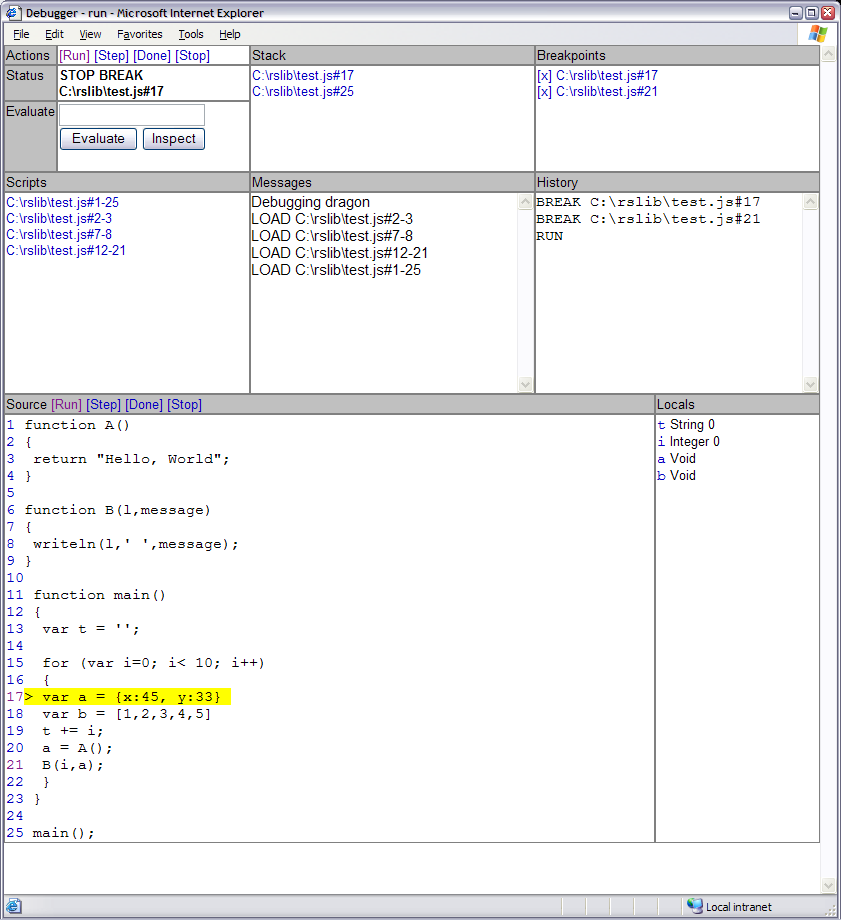
A separate process will start to run myprogram.js, while a web browser will open the debugging console.
1. Download JSDB and unzip.
2. Start two command shells
Shell A will be used to control the debugger. It prints a network
address. The port is different every time.
c:\temp\>jsdb debuggerconsole.js
127.0.0.1:1334
Shell B will run the program that you're debugging. If you want to
debug "test.js", type this:
c:\temp\>jsdb debug.js test.js 127.0.0.1:1334 ...
Shell A will come to life. It'll print
LOAD C:\temp\test.js#1-9
STOP FUNCTION
>
This means that the script "test.js" has been loaded, and you're
stopped at the entry point to the main function. In Shell A, type
"help" and press Enter to get a list of the available commands.
>help
LINE SOURCE STACK SCRIPTS EVALUATE INSPECT
BREAK CLEAR RUN STEP SKIP RETURN STOP THROW
Set a breakpoint at line 4
>break c:\temp\test.js#4
List breakpoints
>break
c:\temp\test.js#4
List scripts
>scripts
c:\temp\test.js#1-9
Next instruction
>step
STOP STEP C:\temp\test.js#1
Soure code of the current script
>source
...
Source code from any loaded script
>source c:\temp\test.js
Single line
>line c:\temp\test.js#5
5 a = {x:45, y:33}
>line #5
5 a = {x:45, y:33}
Or just the current line
>line
...
Run until the breakpoint
>run
>STOP BREAK c:\temp\test.js#4
Clear a breakpoint
>clear c:\temp\test.js#4
Clear all breakpoints in a script
>clear c:\temp\test.js
Clear all breakpoints
>clear
List the names of local variables
>inspect
...
Inspect a particular object
>inspect a
x
y
Find the value
>evaluate a.x
Integer 45
For objects, returns the bytes of memory used
>evaluate a
Object 145
Stop debugging
>stop